robot Package¶
joints Module¶
Module of all the classes related to physical joints. These are objects that link 2 bodies together.
There are two base abstract classes for all joints:
Joint and ActuatedJoint.
They are not coupled (at all) with ODE or any other
physics or collision library/engine.
The classes that implement at least one of those interfaces are these:
There is also an auxiliary class: JointFeedback.
-
class
ActuatedJoint(world, inner_joint, body1=None, body2=None)[source]¶ Bases:
ars.model.robot.joints.JointA joint with an actuator that can exert force and/or torque to connected bodies.
This is an abstract class.
Constructor.
Parameters: - world (
physics.base.World) – - inner_joint (
ode.Joint) – - body1 (
physics.base.Body) – - body2 (
physics.base.Body) –
- world (
-
class
BallSocket(world, body1, body2, anchor)[source]¶ Bases:
ars.model.robot.joints.JointConstructor.
Parameters: - world (
physics.base.World) – - body1 (
physics.base.Body) – - body2 (
physics.base.Body) – - anchor (3-tuple of floats) – joint anchor point
- world (
-
class
Fixed(world, body1, body2)[source]¶ Bases:
ars.model.robot.joints.JointConstructor.
Parameters: - world (
physics.base.World) – - body1 (
physics.base.Body) – - body2 (
physics.base.Body) –
- world (
-
class
Joint(world, inner_joint, body1=None, body2=None)[source]¶ Bases:
objectEntity that links 2 bodies together, enforcing one or more movement constraints.
This is an abstract class.
Constructor.
Parameters: - world (
physics.base.World) – - inner_joint (
ode.Joint) – - body1 (
physics.base.Body) – - body2 (
physics.base.Body) –
-
body1¶
-
body2¶
- world (
-
class
JointFeedback(body1, body2, force1=None, force2=None, torque1=None, torque2=None)[source]¶ Bases:
objectData structure to hold the forces and torques resulting from the interaction of 2 bodies through a joint.
All attributes are private. The results (
force1,force2,torque1,torque2) are all length-3 tuples of floats.Constructor.
Parameters: - body1 (
physics.base.Body) – - body2 (
physics.base.Body) – - force1 (3-tuple of floats) –
- force2 (3-tuple of floats) –
- torque1 (3-tuple of floats) –
- torque2 (3-tuple of floats) –
-
body1¶
-
body2¶
-
force1¶
-
force2¶
-
torque1¶
-
torque2¶
- body1 (
-
class
Rotary(world, body1, body2, anchor, axis)[source]¶ Bases:
ars.model.robot.joints.ActuatedJointConstructor.
Parameters: - world (
physics.base.World) – - body1 (
physics.base.Body) – - body2 (
physics.base.Body) – - anchor (3-tuple of floats) – joint anchor point
- axis (3-tuple of floats) – rotation axis
-
add_torque(torque)[source]¶ Apply torque about the rotation axis.
Parameters: torque (float) – magnitude
-
angle¶ Return the angle between the two bodies.
The zero angle is determined by the position of the bodies when joint’s anchor was set.
Returns: value ranging -piand+piReturn type: float
-
angle_rate¶ Return the rate of change of the angle between the two bodies.
Returns: angle rate Return type: float
-
set_speed(speed, max_force=None)[source]¶ Set rotation speed to
speed.The joint will set that speed by applying a force up to
max_force, so it is not guaranteed thatspeedwill be reached.Parameters: - speed (float) – speed to set
- max_force (float or None) – if not None, the maximum force the joint can apply when trying to set the rotation speed
- world (
-
class
Slider(world, body1, body2, axis)[source]¶ Bases:
ars.model.robot.joints.ActuatedJointJoint with one DOF that constrains two objects to line up along an axis.
It is different from a Piston joint (which has two DOF) in that the Slider does not allow rotation.
Constructor.
Parameters: - world (
physics.base.World) – - body1 (
physics.base.Body) – - body2 (
physics.base.Body) – - axis (3-tuple of floats) – rotation axis
-
position¶ Return position of the joint with respect to its initial position.
The zero position is established when the joint’s axis is set.
Return type: float
-
position_rate¶ Return position’s time derivative, i.e. “speed”.
Return type: float
- world (
-
class
Universal(world, body1, body2, anchor, axis1, axis2)[source]¶ Bases:
ars.model.robot.joints.JointConstructor.
Parameters: - world (
physics.base.World) – - body1 (
physics.base.Body) – - body2 (
physics.base.Body) – - anchor (3-tuple of floats) – joint anchor point
- axis1 (3-tuple of floats) – first universal axis
- axis2 (3-tuple of floats) – second universal axis
- world (
sensors Module¶
Module of all the classes related to sensors.
There are base classes for sensors whose source is a body, joint or simulation. It also considers those which read information automatically by subscribing to certain signals.
Some abstract classes are:
Some practical sensors are:
RotaryJointSensor,JointTorqueLaserGPS,Velometer,Accelerometer,InclinometerKineticEnergy,PotentialEnergy,TotalEnergy,SystemTotalEnergy
It also contains the auxiliary classes SensorData and
SensorDataQueue.
-
class
Accelerometer(body, time_step)[source]¶ Bases:
ars.model.robot.sensors.BodySensorCalculate and retrieve a body’s linear and angular acceleration.
Warning
The provided time_step is used to calculate the acceleration based on the velocity measured at two instants in time. If subsequent calls to on_change are separated by a simulation time period different to the given time_step, the results will be invalid.
-
class
ActuatedJointSensor(joint)[source]¶ Bases:
ars.model.robot.sensors.JointSensorSensor whose source of data is an
ActuatedJointjoint.
-
class
BaseSignalSensor(sender=_Any, autotime=False)[source]¶ Bases:
objectBase class for sensors that handle signals with
on_send().Constructor.
Parameters: - sender – object that will send the signal; if it is
any_sender, subscription will be to any object - autotime – if True and
_get_time()is not overriden, every measurement’s time will set to the computer time in that instant
-
any_sender= _Any¶
-
on_send(sender, *args, **kwargs)[source]¶ Handle signal sent/fired by
senderthrough the dispatcher.Takes care of building a data object, set time to it and save it in the
data_queue.Parameters: - sender – signal sender
- args – signal arguments
- kwargs – signal keyword arguments
-
sender¶ Return the sender of the signal to which the sensor listens.
- sender – object that will send the signal; if it is
-
class
BaseSourceSensor(source)[source]¶ Bases:
objectAbstract base class for all sensors.
Sensor data is stored in a queue (
data_queue), and it is usually retrieved after the simulation ends but can be accessed at any time:measurement = sensor.data_queue.pull()
Warning
Beware that
ars.utils.containers.Queue.pull()returns the first element of the queue and removes it.-
on_change(time=None)[source]¶ Build a
SensorDataobject and stores it in thedata_queue.Parameters: time (number or None) – if None, current (computer’s) time is used
-
source¶
-
-
class
BodySensor(body)[source]¶ Bases:
ars.model.robot.sensors.BaseSourceSensorAbstract base class for sensors whose source of data is a body.
-
body¶
-
-
class
GPS(body)[source]¶ Bases:
ars.model.robot.sensors.BodySensorRetrieve a body’s XYZ position.
-
class
Inclinometer(body)[source]¶ Bases:
ars.model.robot.sensors.BodySensorRetrieve a body’s pitch and roll.
-
class
JointForce(sim_joint, sim)[source]¶ Bases:
ars.model.robot.sensors.SingleSignalSensorSensor measuring force ‘added’ to a joint.
-
signal= 'robot joint post add force'¶
-
-
class
JointPower(sim_joint, sim)[source]¶ Bases:
ars.model.robot.sensors.MultipleSignalsSensorSensor measuring power applied by a joint (due to force and torque).
-
signals= ['robot joint post add torque', 'robot joint post add force']¶
-
-
class
JointSensor(joint)[source]¶ Bases:
ars.model.robot.sensors.BaseSourceSensorAbstract base class for sensors whose source of data is a joint.
-
joint¶
-
-
class
JointTorque(sim_joint, sim)[source]¶ Bases:
ars.model.robot.sensors.SingleSignalSensorSensor measuring torque added to a joint.
-
signal= 'robot joint post add torque'¶
-
-
class
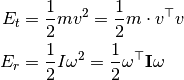
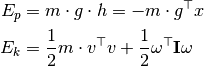
KineticEnergy(body)[source]¶ Bases:
ars.model.robot.sensors.BodySensorRetrieve a body’s kinetic energy, both due to translation and rotation.
-
class
Laser(space, max_distance=10.0)[source]¶ Bases:
ars.model.robot.sensors.BaseSourceSensorLaser scanner.
-
class
MultipleSignalsSensor(signals, *args, **kwargs)[source]¶ Bases:
ars.model.robot.sensors.BaseSignalSensorAbstract base class for sensors subscribed to multiple signals.
Constructor.
Parameters: signals (iterable) – signals to subscribe to
-
class
PotentialEnergy(body, gravity)[source]¶ Bases:
ars.model.robot.sensors.BodySensorRetrieve a body’s potential energy.
Calculated based on the current position (x) and world’s gravitational acceleration (g).

-
class
RotaryJointSensor(joint)[source]¶ Bases:
ars.model.robot.sensors.ActuatedJointSensorSensor measuring the angle (and its rate) of a rotary joint.
-
class
SensorData(*args, **kwargs)[source]¶ Bases:
objectData structure to pack a sensor measurement’s information.
-
class
SensorDataQueue[source]¶ Bases:
ars.utils.containers.QueueQueue-like container for sensor measurements.
-
class
SimulationSensor(sim)[source]¶ Bases:
ars.model.robot.sensors.BaseSourceSensorAbstract base class for sensors whose source of data is a simulation.
Constructor.
Parameters: sim ( ars.model.simulator.Simulation) – simulation-
sim¶ Return the simulation object.
Returns: simulation Return type: ars.model.simulator.Simulation
-
-
class
SingleSignalSensor(signal, *args, **kwargs)[source]¶ Bases:
ars.model.robot.sensors.BaseSignalSensorAbstract base class for sensors subscribed to one signal.
Constructor.
Parameters: signal – signal to subscribe to
-
class
SystemTotalEnergy(sim, disaggregate=False)[source]¶ Bases:
ars.model.robot.sensors.SimulationSensorRetrieve a system’s total potential and kinetic energy.
It considers all bodies in the simulation. The kinetic energy accounts for translation and rotation.
-
class
TotalEnergy(body, gravity, disaggregate=False)[source]¶ Bases:
ars.model.robot.sensors.BodySensorRetrieve a body’s potential and kinetic energy.
The kinetic energy accounts for translation and rotation.
-
class
Velometer(body)[source]¶ Bases:
ars.model.robot.sensors.BodySensorCalculate and retrieve a body’s linear and angular velocity.
signals Module¶
This module contains string values defining different signals related to
the ars.model.robot package.